
军事智能
随着军事对抗不断向科技化、无人化方向发展,军事智能逐渐成为未来军事演化的重点方向。由于军队作战具有环境高复杂性、博弈强对抗性、响应高实时性、信息不完整性、边界不确定性等特点,因此高度的自主决策、环境勘察、群体合作、人机协作等问题是实现群是智能的重要挑战。下面就作者团队在军事智能中探索的全自动机器人射击对抗平台进行简要介绍。
全自动机器人射击对抗平台
全自动机器人射击对抗平台作为一个战场环境模拟对抗平台,场上可以布置多种类型的功能机关,通过移动机器人感知战场的环境信息,根据场上形势自主决策,进行运动规划与控制。移动机器人通过发射弹丸击打敌方机器人进行射击对抗,如图1.a。机器人的数据交互由一个专门的裁判系统进行监测,裁判系统将弹丸的伤害转换为HP的动态变化,最终以一个类似游戏的形式进行展现。
在场景设计方面,平台构建模拟场景以供多智能体的决策训练,如图1.b所示,模拟场景包含场地补给、障碍限制、防御增益、攻击增益等多个影响元素。以模拟复杂多变的真实战场环境。
在移动机器人方面,使用ICRA Robomaster全向移动机器人开发平台,如图1.c所示,该平台开源了硬件设计、基于 STM32 系列单片机嵌入式框架以及支持机器人操作系统(ROS)的 RoboRTS 机载平台软件框架,并可以基于以上内容配置相机与激光雷达等个性化传感器、机载计算设备进行二次开发,完成机体定位、运动规划、敌我机器人检测、自主决策和自动控制等功能的多机器人全自动对抗。机器人使用多智能体强化学习机制,通过群智协作的机理将队伍得分和合作评分加入奖励机制,训练多智能体系统的协作行为,具体使用 MADRL 算法中全通信集中决策的架构。

(a)机器人射击对抗

(b)机器人平台
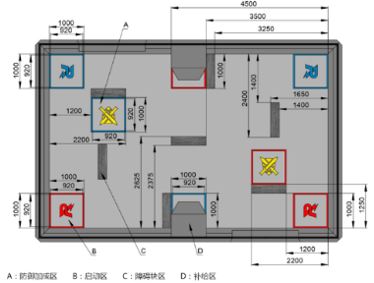
(c)模拟场景地图