a software-hardware co-design model deployment process based on a group of compression operators and Dynamic Voltage Frequency Scaling (DVFS) for microcontroller (MCU) devices according to dynamic context.
Applying the classic multi-agent reinforcement learning algorithm MADDPG and BiCNet to the AGV task allocation scenario, introducing the Information Potential Field optimization reward mechanism to accelerate training convergence.
Crowd Intelligence with the Deep Fusion of Human, Machine and Things Open Platform!Aiming to open-source key technologies in human-machine-object fusion swarm intelligence computation.
A Context-Aware Deep Model Mobile Edge Computing Framework for Adaptive Optimization of Collaborative Computation and Offloading Plans in Dynamic Environments to Adapt tuning.
The Multi-Environment Federated Continual Learning (MEFCL) algorithm explores how intelligent agents can quickly adapt to new environments while not forgetting old environment knowledge, and promotes knowledge fusion across multiple environments.
AI-Mate is a high-fidelity, personalized virtual human shaping platform that combines virtual and real elements with a software and hardware collaborative design.
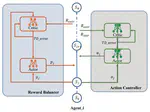
A multi-vehicle collaborative delivery algorithm based on multi-agent reinforcement learning is proposed, which applies the Multi-Agent Deep Reinforcement Learning algorithm MADDPG to the workshop delivery scenario.
Accelerating Traditional Federated Learning Process and Improving Global Model Accuracy by Training Shared Data as Auxiliary Models with Transfer Learning and Shallow/Deep Layer Theories of Deep Learning.
The MDN algorithm uses a model-agnostic meta-learning algorithm to divide the model’s training into event adaptation and specific event detection stages, enabling the model to learn from existing knowledge and adjust parameters based on new tasks.
A swarm intelligence collaborative enhancement mechanism algorithm, derived from biological swarm intelligence, utilizes virtual structures and leader-following methods to achieve a dynamic 3D multi-agent formation.