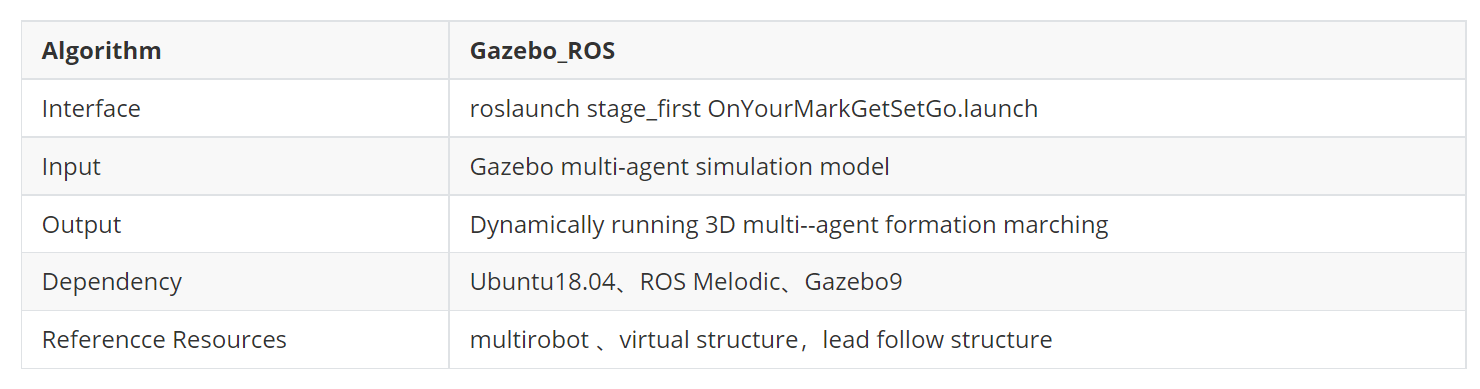
Gazebo_ROS:Crowdsourced Collaborative Reinforcement Learning Algorithm
A swarm intelligence collaborative enhancement mechanism algorithm, derived from biological swarm intelligence, utilizes virtual structures and leader-following methods to achieve a dynamic 3D multi-agent formation.
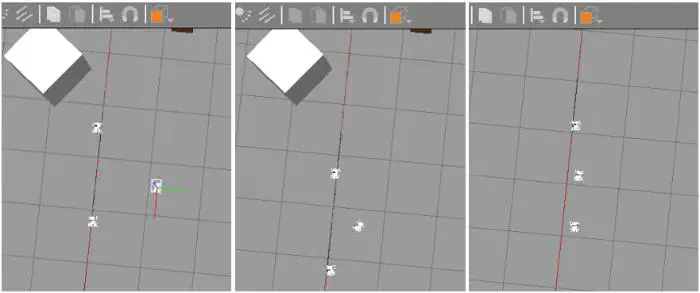
Model Architecture Diagram:
Description: The virtual structure and leader-following methods derived from biological swarm intelligence involve assigning linear and angular velocities to multiple agents prior to activation using the virtual structure method. By controlling the predetermined type of virtual structure, robots adjust their behavior to form the given virtual structure and control the entire formation by setting the motion trajectories of all members. The leader-following method assigns leader or follower roles to all members, with the leader specifying the motion trajectory and defining the distance and angle to be maintained by the followers. This enables the formation of circular, column, and V-shaped formations through the communication of position coordinates between multiple agents.