HBicNet:Multi-Agent Reinforcement Learning Algorithm
Applying the classic multi-agent reinforcement learning algorithm MADDPG and BiCNet to the AGV task allocation scenario, introducing the Information Potential Field optimization reward mechanism to accelerate training convergence.
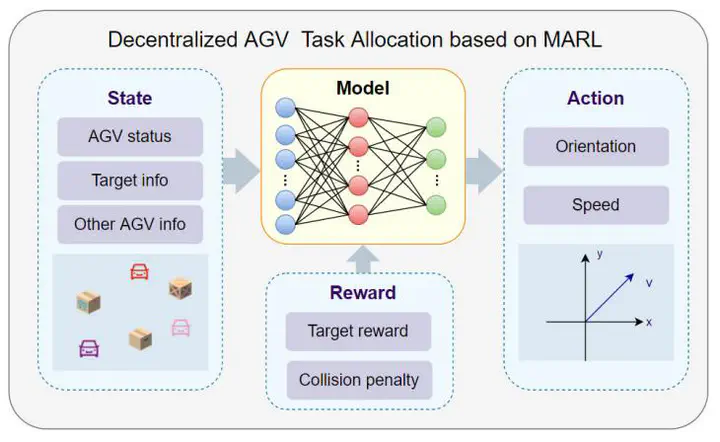
Model Architecture Diagram:

Description: In the dynamic task allocation scenario for multiple AGVs, our goal is for the AGVs to self-organize and continuously transport more goods. If we directly apply the multi-agent bidirectional coordination network BiCNet for task allocation, there are issues such as sparse rewards and non-stationary environments. To address this, we propose a hierarchical multi-agent reinforcement learning algorithm HBiCNet. By decomposing the complex task allocation problem into two sub-problems: target selection and path planning, AGVs can move more purposefully, which improves the efficiency of the multiple AGV system’s transportation.