LeggedRL:Quadrupedal Robots Reinforcement Learning Motion Planning
Training Quadrupedal Robots for Reinforcement Learning Motion Planning with PyBullet: Capable of executing many recognitions and learning complex functionalities.
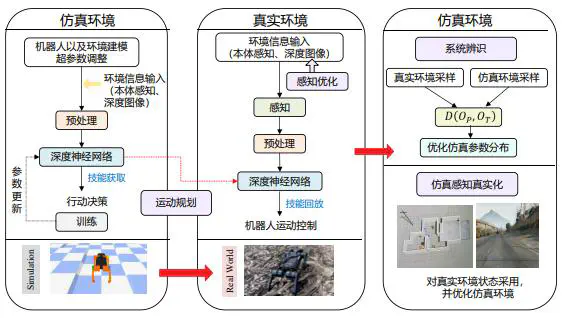
Model Architecture Diagram:

Description: The main features include quadruped robot locomotion, terrain creation from elevation maps and environmental states, PPO training and motion training, actuator network motor identification, curriculum learningfor perturbations and terrain, visualization of commands, forces, torques, terrain, and trajectories, general-purpose parallelized training, and imitation learning from privileged teachers to self-perception students. The output is “Reinforcement Learning Motion Model”.
访问量次